|
All of our resources are available for free. Provide an email address below to download. |
Robotics education can be intimidating. Our goal is to make robotics education more accessible for both teachers and students. We want to show students that the disciplines of applied physics, mechanical engineering, computer programming, electrical engineering, mechatronics, and robotics are all interconnected.
Download the Introduction to the Iris Robot Platform ebook for assembly and operating instructions to get started with your Iris Robot. |
Introduction to the Iris Robot Platform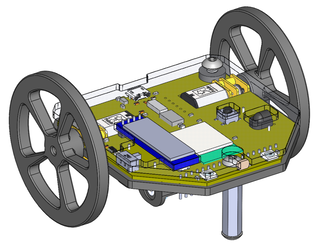
|
The Introduction to the Iris Robot Platform ebook is designed for in-depth discovery with the Iris Robot Platform. Iris is a palm-sized mobile robotics platform that can be programmed to run around your desk or the floor. As an introduction to coding or as the next platform to challenge yourself, Iris is a perfect fit. Through the chapters of the ebook, all of the peripherals of the Iris platform will be tested and explained. These peripherals help your robot to sense the world around it, display feedback for those watching, and maneuver around obstacles in its way.
By the end of the ebook you will be able to: - Turn an LED on, off, and blink - Use the feedback from a button - Learn about the robot’s environment using a light sensor - Communicate using the on-board OLED screen - Play with color using the Neopixels - Drive the Iris Robot using two motors - Utilize WiFi to create a remote connection to the robot - Control the robot using an infrared remote - Operate the robot with a Bluetooth-connected device |
Appendix A:
|
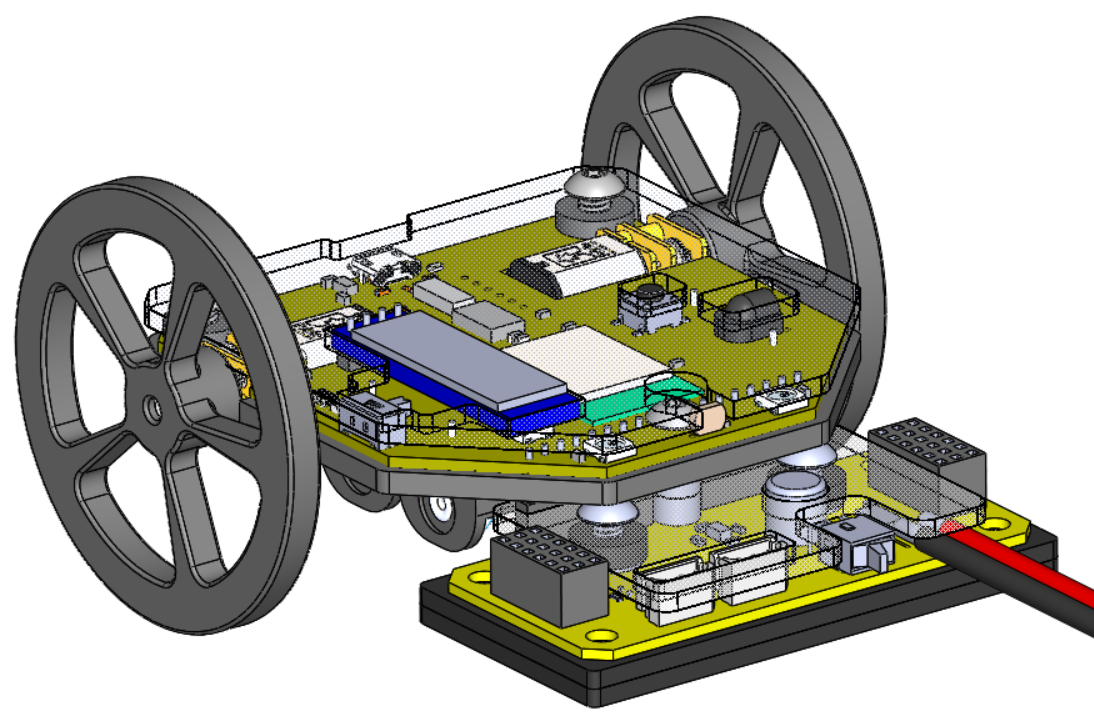
The Iris robot is a fully capable self-contained robot. It is able to sense and react to its environment while communicating and moving, allowing all kinds of exploration as the perfect introduction to robotics. However, when you are ready to expand beyond the included sensors and motors you can use the Iris Dock for further investigation. This document will walk you through the capabilities, installation, and operation of the Iris Dock so you can use it as the interface for a custom robot with additional motor possibilities, sensor possibilities, power, and size. |
Appendix B:
|
The Iris Library was built to allow easier connection and usage of the Iris Robot Platform. Once the built-in features of the Iris robot are mastered, expanded capabilities can be utilized through the addition of the Iris dock. The dock expands the reach of Iris to include external motors, a larger battery, as well as external sensors. This appendix describes all of the built-in functions for the Iris Robot as well as the Iris Dock, as well as instructions on how to install, update, and delete libraries in the Arduino IDE. |

Appendix C:
|
This Default Code with PS4 guide will help you understand what the default code enables you to do for controlling either your own robot, or the stand-alone Iris Robot. The default code loaded onto Iris that enables PS4 control of the larger, custom robot is also capable of controlling Iris on its own. The default code is programmed such that when the PS4 controller is connected to Iris, the program running on Iris will translate controller inputs into commands for the six 3-wire motor ports on the Dock. All of the built-in commands for the motor ports can be found in this guide. |

Appendix D:
|
The Clawbot Assembly instruction manual will walk you through the creation of the Iris Clawbot. The Iris Clawbot is made from six motors, four dedicated to driving, one for the shoulder, and one to operate the claw. The robot was designed to showcase the flexibility of the framing material as well as how to use flat material to construct a three-dimensional robot. The Iris Clawbot can be made using the Open Robotics Kit. This appendix also includes a list of all the components (mechanical and electrical) that are included in the Open Robotics Kit. |
